Сегодня мало кого можно удивить шарнирными роботами. Но их присутствие на предприятиях невольно создаёт ассоциацию футуристического мира. Гигантские мощные руки чётко выполняют монотонную работу, без каких-либо эмоций, что делает их движения загадочными. Скорость и качество работы остаются на высоком уровне, несмотря на любой час смены.
В то время как внимание и работоспособность человека, другими словами мотивация к труду, падает через несколько часов после выхода на смену. И это не говоря о депрессии, проблемах пищеварения, снижении иммунитета и прочих напастях, присущих сотрудникам предприятий. Именно поэтому так много фабрик в мире предпочитают полагаться на роботизированную рабочую лошадку, способную трудиться по 2-3 смены без устали.
Что такое шарнирный робот?
Шарнирные роботы-манипуляторы (articulated robot) представляют собой наиболее распространённый тип промышленных роботов. Их сходство с человеческой рукой является главной причиной, по которой они так выделяются в нашем сознании. Но именно механические преимущества этой конструкции являются реальной причиной их повсеместного распространения и долговечности. Строение рычажного механизма по кинематической схеме сочетает в себе широкий диапазон вращательных движений с преимуществами точного перемещения.
Шарнирные манипуляторы идеально подходят для:
- сварки;
- сборки;
- обработки;
- погрузочно-разгрузочных работ;
- операций по перемещению и распределению.
Их многочисленные оси и степени свободы означают, что в рабочей области практически нет точки, до которой они не могли бы добраться. Это делает шарнирных роботов одними из самых универсальных, гибких и компактных автоматизированных конструкций на рынке. Кстати, ещё роботизированные руки называют коботами. Именно под таким наименованием они встречаются в каталогах.
Кобот (коллаборативный робот) — это робот, который может хорошо исполнять монотонную и рутинную работу.
Вес, который могут держать эти машины, превышает вес удержания человеческими руками (до 300 кг). Поэтому коботы нередко ставят для обработки увесистого металла. Но помимо тяжёлой промышленности шарнирные манипуляторы используют и в других отраслях, среди которых: лаборатории, хирургия, подводные исследования и предприятия с агрессивной средой. Коботы можно установить на пол, на стену или даже на потолок. Этот инструмент способен повысить эффективность работы на заводах и улучшить качество жизни сотрудников.
Движение шарнирного робота
Концепция движения шарнирных роботов строится на вращающихся соединениях. Количество сочленений зависит от конфигурации модели: от 3-х до более сложного строения с 5-ю, 6-ю и даже с 10-ю осями. Но последняя система сложна, как в изготовлении, так и в эксплуатации.
Поэтому наиболее распространены роботы с шестью степенями свободы. Серводвигатели, приводящие в действие шарниры, действуют как безельные шестерни (по аналогии с наручными часами). Изменяют направление движения на угол до 90 градусов, а также обеспечивают регулировку упоров для точного программирования и артикуляции.
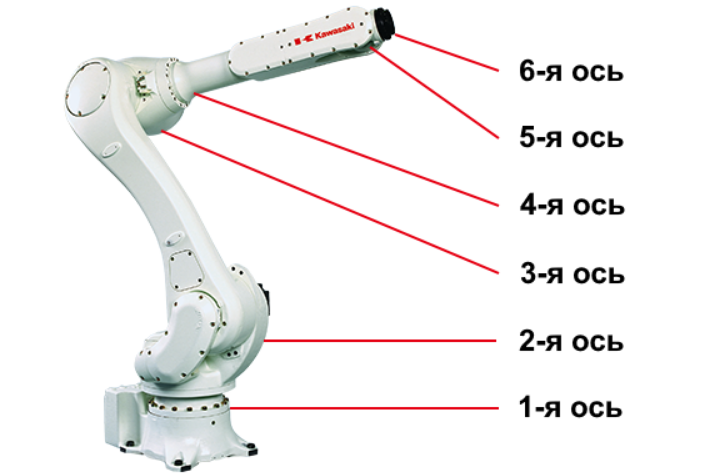
Оси (суставы) робота
Сравнение движений робота и человека
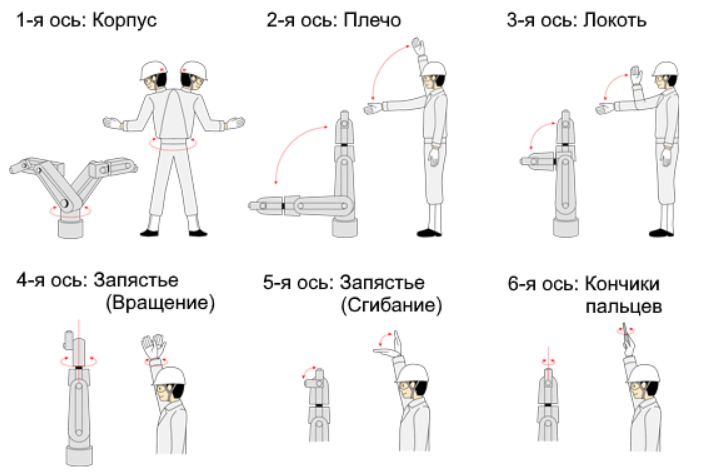
Робототехникам ещё есть куда стремиться. Ведь человеческая рука битком набита примерно 17 000 нервов, которые позволяют ей не только распознавать физическое прикосновение к объекту, но и почти мгновенно ощущать вес, твёрдость, форму, температуру и текстуру этого объекта.
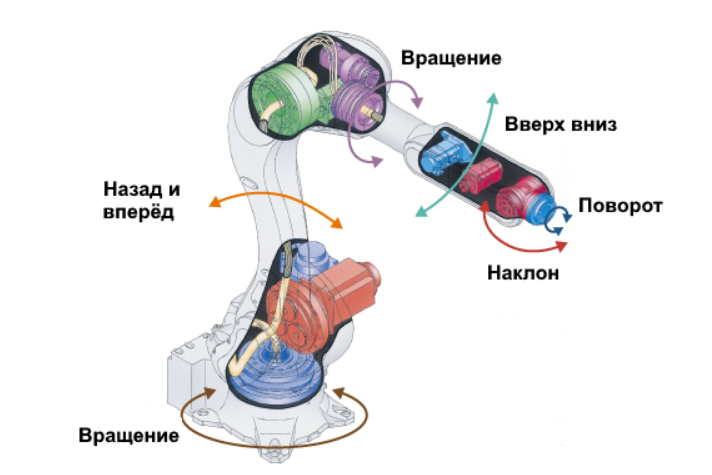
Устройство шарнирного робота с 6-ю осями
Роботы с 6-ю степенями свободы разрабатываются для широкого спектра задач, от обработки и сварки металлических изделий, до сборки электронных устройств или окраски сложных конструкций. У многих из них электрическая сеть управления, а также пневматика или гидравлика, спрятанные внутри корпуса. Это помогает обеспечить работу без помех от дополнительного оборудования. При этом роботизированные руки остаются компактными и достаточно скоростными на всех звеньях.
Предлагаем кратко рассмотреть строение шарнирного робота, которое включает следующие основные узлы:
- Звенья.
- Запястье.
- Редукторы.
- Двигатели.
- Энкодеры.
- Трансмиссия.
- Блок управления.
Перечисленные элементы компонуются на металлическом основании из стали, алюминия, титана и других материалов.
1. Звенья
Типовой шарнирный манипулятор состоит из 3-х плеч: управляемое, вспомогательное и опорное. Каждое из них соединяется звеньями к концу другого, образовывая кинематическую пару. Проще говоря, звенья – это аналог суставов человеческой руки. Поэтому 6-осевой шарнирный робот обладает такой же подвижностью, как и человеческая рука. Самое нижнее (нулевое) звено – это основание. К нему через редуктор первой оси крепится плечо 1-го звена. А к первому через редуктор второй оси присоединяется плечо 2-го звена. Далее фиксируется третье звено. В свою очередь четвёртое, пятое и шестое звенья формируют рабочий узел «запястье». Этот модуль и крепится к плечу третьего звена через редуктор четвёртой оси.
2. Запястье
Шарнирно-сочлененное запястье – сложный узел. Он состоит из трёх корпусов и трёх осей, что позволяет ему вращаться в 3-х степенях свободы. Возвратно-поступательные перемещения самих корпусов обеспечивают максимальную манёвренность запястья. Оно в свою очередь может быть с электромеханическим или гидравлическим приводом, а также дооснащаться всевозможным специальным инструментом — закручивающим, сварочным, режущим и т.д.
3. Редукторы
Редуктор с мотором образовывают звено (сустав). На профессиональном языке этот узел называют приводом. Основным соединяющим сустав элементом выступает именно редуктор. Он крепится между мотором и корпусом звена. Строение редуктора включает в себя передачи разного рода, устроенные таким образом, чтобы крутящий момент вала двигателя преобразовывался в более мощное вращение на выходе, но с меньшей скоростью. Это повышает мощность привода (по аналогии с велосипедной передачей для движения в гору).
4. Двигатели
Миссия моторов (серводвигателей) – приводить в движение редукторы и фиксировать их в определённом положении. Благодаря им автоматизированная рука оживает и может двигаться в суставах вверх, вниз или вращаться. Точность работы серводвигателей до 0,01 мм. Серводвигатели бывают:
- электрическими;
- гидравлическими;
- пневматическими.
Довольно часто моторы на гидравлике или пневматике устанавливают на узел «запястье».
5. Энкодеры
Энкодер – это датчик угла поворотов. Он определяет положение вала вращения мотора и передаёт данные на центральный процессор управления. Чаще всего сенсоры оптические, в которые входят: светодиоды, фотодиоды, вращающийся кодовый диск. Они могут фиксировать вращение до 360° в разрешении до 32 бит (преобразуют аналоговый сигнал в цифровой).
6. Трансмиссия
Основной двигатель шарнирного робота размещается рядом с манипулятором. Его крутящий момент передаётся на 1-ю ось посредством ременной передачи или цепи. На мощных роботах передача к 3-й оси осуществляется совместным действием последовательно соединённых: волнового редуктора, винтового механизма и механизма параллельных кривошипов (параллелограммного механизма). В целом тип трансмиссии определяется видом запястья, который может быть: захватом, сварочной горелкой, покрасочным распылителем или другим оборудованием.
7. Блок управления
Робот по умолчанию работает под управлением «собственных мозгов». Автоматический режим обеспечивает ему промышленный контроллер. Он оснащён программным обеспечением, что позволяет машине работать в рамках заданных операций. Также контроллер вычисляет параметры обработки, руководствуясь поступающими данными с датчиков, что в свою очередь позволяет настроить синхронизированную работу даже целой линии из роботов.
Разновидности роботов
Коботы, в первую очередь, подразделяются на типы по количеству шарнирных соединений от 3-х до 10-х. Но вместе с этим их разделяются по разным принципам работы запястья. Например, одни берут предметы раздвижными пальцами, а другие притягивают материал электромагнитным устройством. Поэтому в каталогах роботы обозначаются с учётом конструкции запястья.
По принципу действия:
- вакуумные;
- магнитные;
- механические.
По характеру базирования:
- базирующие;
- центрирующие;
- перебазирующие.
По характеру крепления:
- сменные;
- несменяемые;
- быстросменные;
- с автоматической сменой.
По виду управления:
- адаптивные;
- командные;
- неуправляемые;
- жёстко программируемые.
По типу губок:
- гибкие;
- жёсткие;
- пружинящие;
- регулируемые.
По типу привода:
- пружинные;
- гидравлические;
- пневматические;
- электромеханические.
Если заказчику говорят, что робот «магнитный», то это значит его запястье оснащено магнитным захватом.
Преимущества и недостатки шарнирно-сочленённого робота
Как и у любого рыночного продукта, у шарнирного робота есть свои плюсы и минусы. О них желательно знать заранее перед выбором оборудования для предприятия.
Преимущества:
- высокоточная производительность;
- простота в управлении и эксплуатации;
- вращательные кинематические пары для различных целей и задач;
- универсальный способ монтажа: вертикальный, настенный или потолочный;
- встроенные сетевые функции с подключением к интернету и последовательные каналы связи в стандартной комплектации.
Недостатки:
- высокая стоимость;
- низкая скорость работы (по сравнению с другими промышленными роботами);
- свободу действий обеспечивает сложная кинематика и непростая система управления, которые могут обслуживать только специалисты;
- высокая плотность компонентов внутри корпусов создаёт инерционный барьер, что иногда мешает его преодолевать при любом изменении направления.
Несмотря на озвученные недостатки, шарнирно-сочленённые роботы пользуются высоким спросом промышленниками всего мира. Поскольку только они способны заменить человека на сложных и опасных работах, повышая тем самым безопасность труда.
Справочно. Первым прототипом промышленного робота считается модель английского инженера Билла Гриффита П. Тейлора, показанная в 1937 году. Это была грубая машина, которую создатель назвал Роботом-Гаргантюа. Но только в 1970-х годах развернулась лихорадочная технологическая гонка между японскими и североамериканскими компаниями, с целью произвести революцию на рынке промышленного массового производства с помощью робототехники.
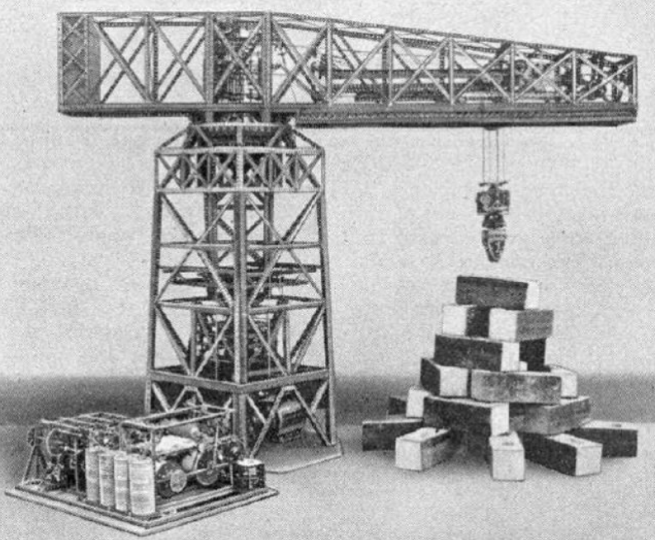
Робот-Гаргантюа (1937 г).
Какие ещё есть типы промышленных роботов-манипуляторов?
Существует несколько типов роботов-манипуляторов. Они подразделяются в зависимости от: выполняемых движений, среды эксплуатации, осуществляемых операций. На рынке вы сможете найти следующие виды коботов:
- Декартовский робот (картезианский): устройство, имеющее три линейные оси и поэтому перемещающееся только в поперечном направлении. Этот тип используется, прежде всего, в операциях захвата и размещения, а также в сборочных операциях.
- Цилиндрический робот: часто применяется для управления машинами литья под давлением, точечной сварки или выполнения очень сложных сборочных операций. Его цилиндрическая форма допускает два линейных движения и одно вращательное.
- Полярный робот (сферический): обязан своим названием тому факту, что именно сферические координаты отмечают движения этого устройства по отношению к другой системе отсчёта. Он особенно полезен в процессах газовой сварки, литья металла или фрезерования.
- Робот SCARA: Аббревиатура на английском языке от Selective Compliant Assembly Robot Arm, что буквально переводится как «роботизированная рука для выборочной сборки, соответствующая требованиям». Данный представитель выделяется гибкостью, поскольку имеет до четырёх степеней свободы. Это даёт ему скорость и простоту, по сравнению с другими видами роботов, такими как «картезианцы».
- Дельта-робот (параллельный робот): оснащён мобильной платформой, тремя рычагами и поворотными соединениями, гарантирующими широкий диапазон движений. В основном используется в мелкосерийном производстве продукции.
При автоматизации предприятия инженер по организации труда должен решить, какой тип робота-манипулятора установить и как организовать схему линии, учитывая потоки: материала, заготовок, товаров, комплектования, груза, а также других факторов.
Обзор промышленных роботов
Предлагаем небольшой обзор промышленных шарнирно-сочленённых роботов с кратким описанием и основными техническими характеристиками.
Сварочный робот HS-R6-165

Робот универсальный 6-осевой, – одинаково хорошо подходит для точечной сварки или погрузочно-разгрузочных работ. Способен выполнять операции точечной сварки внутри и снаружи автомобильных кабин, и кузовов, а также для производства иных деталей. Модель оснащена встроенным сервоприводом управления.
В компактной и полой изогнутой руке манипулятора уложены кабельные трассы. Их потайное размещение сводит к минимуму помехи системного оборудования и позволяет роботу двигаться на тесных рабочих площадках. Сочленение по 6-и осям обеспечивает максимальную гибкость доступа к нескольким рабочим зонам, даже в очень ограниченном пространстве.
Запястье оснащается сварочными клещами или горелкой. Может быть установлен захват для работы на складском терминале. Степень защиты IP67 позволяет эксплуатацию в заводских условиях с пылью и масляным туманом. Гладкая поверхность сводит к минимуму сбор брызг от сварки, сокращая техническое обслуживание.
Для управления роботом используется новейший контроллер с множеством интеллектуальных функций. Интуитивно понятный пульт лёгок в настройках и эксплуатации. А новейшее программное обеспечение следит за скоростью и положением, чтобы ограничить зону действия в пределах компактного рабочего пространства.
| HS-R6-165 | |
|---|---|
| Допустимая нагрузка, кг | 165 |
| Расстояние досягаемости, мм | 2486 |
| Мощность сварки, кВА | 100 |
| Длина держателя электрода, мм | 300 |
| Свариваемый элемент, мм | 2000 х 1200 |
| Габаритные размеры, мм | 3740 х 1050 х 1610 |
| Вес (общий), кг | 5800 |
Промышленный робот AR1730

Промышленный многофункциональный 6-осевой шарнирный робот для обработки металла: сварка, удаление заусенцев, формирования кромок, фрезерование, сверление, нарезание резьбы, зачистка и захват. Обработка выполняется всухую, с подачей смазочно-охлаждающей жидкости или с использованием минимального количества смазки. Робот универсален, способен перемещать заготовки к инструментам или, наоборот, перемещать инструмент к обрабатываемой детали. Легко интегрируется в автоматизированные ячейки, работает вместе с обрабатывающими центрами, станциями контроля качества или мойки.
Модель робота оснащается цифровым управлением. Программирование может компенсировать отклонения от идеального пути в точках разворота в определённых пределах. Эти роботы также предлагают точное ручное управление, то есть, этап тонкой сборки может контролироваться человеком через джойстик напрямую.
| AR1730 | |
|---|---|
| Управляемые оси, кол-во | 6 |
| Максимальная нагрузка, кг | 25 |
| Точность воспроизведения (повторения), мм | ± 0.02 |
| Максимальный рабочий диапазон (досягаемость), мм | 1730 |
| Температура, C° | от 0 до + 45 |
| Влажность, % | 20 – 80 |
| Источник питания, кВА | 2 |
| Вес, кг | 250 |
| Вес (с плазменным резаком), кг | 600 |
| Вес (с лазерным резаком), кг | 1000 |
Промышленный робот RB50
Универсальный 6-осевой промышленный робот адаптивного типа. Предназначен для широкого перечня операций: сварка, резка, шлифовка, покраска, укладка, погрузочно-разгрузочные работы и др. Отличается низким процентом брака. Ускоряет технологический процесс и существенно влияет на повышение КПД предприятия.
Корпус прочный и долговечный, из высококачественных сплавов. Основание крепится к полу анкерными болтами. Шарнирно-соединённые звенья сбалансированы, что позволяет задействовать робот в течение длительного времени. Каждое плечо имеет собственный серводвигатель, что обеспечивает точность и плавность подачи.
Модель управляется программируемым логическим контроллером GAK-RC. Память устройства позволяет хранить в архиве значительный перечень производственных алгоритмов и запускать их одной клавишей с помощью функции «Ключ». Скорость работы может быть оптимизирована самим роботом без вмешательства оператора, в соответствии с анализом фактической нагрузки. Дистанционная консоль управления позволяет оператору переходить на более удобное место наблюдения. Пульт оснащается высокочувствительным сенсорным экраном с диагональю 6,4 дюйма.
| RB50 | |||
|---|---|---|---|
| Количество осей | 6 | ||
| Максимальный поднимаемый вес, кг | 50 | ||
| Диапазон движения | Ось 1 | ±180° | |
| Ось 2 | +130°~ -90° | ||
| Ось 3 | +280°~160° | ||
| Ось 4 | ±360° | ||
| Ось 5 | ±120° | ||
| Ось 6 | ±360° | ||
| Максимальная скорость | Ось 1 | 1.23 рад/с,70°/с | |
| Ось 2 | 1.12 рад/с,64°/с | ||
| Ось 3 | 0.90 рад/с,51°/с | ||
| Ось 4 | 2.51 рад/с,144°/с | ||
| Ось 5 | 2.92 рад/с,167°/с | ||
| Ось 6 | 5.10 рад/с,292°/с | ||
| Внешняя среда | Температура | 0~45° | |
| Влажность | 20%~80% | ||
| Вес блока управления, кг | 125 | ||
| Вес робота, кг | 600 | ||
Промышленный робот RB20
Промышленный 6-осевой универсальный робот. Представляет собой автоматизированный электрогидравлический тип оборудования адаптивного характера для непрерывного производства. Предназначен для работы на складах в качестве укладчика лёгких грузов, а также для эксплуатации в цехах различных промышленных предприятий в составе конвейерных линий, где способен выполнять отдельные операции обработки металла: сварка, клёпка, резка, покраска и т.п.
Корпус и внутренние элементы конструкции выполнены из высокопрочных материалов. Рука манипулятора сбалансирована и может находится в рабочем состоянии длительное время. Двигательная система и шарнирно-соединительные звенья, которые отвечают за вращательные и поступательные движения, являются разработками производителя, что существенно снижает общую себестоимость машины.
Робот может быть закреплён только на ровном полу в цехах с трёхфазной сетью (380В, 50Гц), на значительном расстоянии от возможных утечек легковоспламеняющихся, взрывоопасных или агрессивных жидкостей и газов. На верхнем колене имеется площадка с возможностью крепления таких дополнительных элементов, как, например, сварочный аппарат.
Модель оборудуется системой автоматического управления на платформе цифровых технологий. Программируемый логический контроллер GSK-RC оптимизирует скорость работы без вмешательства оператора, исходя из анализа общего объёма работы. Персонал вводит установочные данные операции на цветном мониторе диагональю в 6,4-дюйма. Имеется функция запуска сохранённого алгоритма операции с помощью только одной клавиши. Дистанционная консоль даёт возможность оператору выбрать наилучшую позицию для обзора рабочих процессов.
| RB20 | ||
|---|---|---|
| Количество осей | 6 | |
| Максимальный поднимаемый вес, кг | 20 | |
| Диапазон движения | Ось 1 | ±170° |
| Ось 2 | +133°~ -95° | |
| Ось 3 | +76°~166° | |
| Ось 4 | ±180° | |
| Ось 5 | ±133° | |
| Ось 6 | ±360° | |
| Максимальная скорость | Ось 1 | 1.90 рад/с,109°/с |
| Ось 2 | 1.30 рад/с,74.5°/с | |
| Ось 3 | 1.74 рад/с,100°/с | |
| Ось 4 | 3.39 рад/с,225°/с | |
| Ось 5 | 2.56 рад/с,147°/с | |
| Ось 6 | 5.16 рад/с,296°/с | |
| Внешняя среда | Температура | 0~45° |
| Влажность | 20%~80% | |
| Вес блока управления, кг | 125 | |
| Вес робота, кг | 245 | |
Промышленный робот ER220

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Универсальный промышленный робот для производственных предприятий различного масштаба с целью выполнения широкого перечня операций технологического цикла (сварка, покраска, сверление, клёпка, шлифовка, полировка и т.п.), а также для перемещения деталей производства в трёхмерном пространстве. Представляет собой высокоточное и высокоскоростное электрогидравлическое устройство адаптивного типа. Минимизирует ручной труд и повышает КПД. Может использоваться в составе автоматической производственной линии или самостоятельно.
Основание робота фиксируется анкерными болтами на подготовленной площадке пола, стены или потолка. Основная функция манипулятора заключается в безошибочном и своевременном позиционировании захватывающего блока или сменного исполнительного инструмента (сверло, фреза и т.д.). Вращательные и поступательные движения шарнирно-соединённых звеньев обеспечиваются серводвигателями. В свою очередь гидравлические приводы помогают поднимать тяжёлые грузы. Охлаждение осуществляется водяной системой.
Робот-манипулятор управляется автоматической системой на базе программируемого логического контроллера GSK-RC. Центральный процессор оперирует кодами программы и данными с датчиков, что обеспечивает точное движение исполнительных органов манипулятора. Электроавтоматика скомпонована в металлической тумбе, на внешнюю панель которой выведен пульт, оборудованный цветным сенсорным экраном (диагональ 6,4-дюйма). Управлять роботом несложно, поэтому обучение оператора займёт 2-3 дня.
| ER220 | ||
|---|---|---|
| Количество осей | 6 | |
| Досягаемость, мм | 2650 | |
| Максимальный поднимаемый вес, кг | 220 | |
| Привод | AC сервопривод | |
| Диапазон движения | Ось 1 | ±180° |
| Ось 2 | -55°~ +80° | |
| Ось 3 | +195°~+80° | |
| Ось 4 | ±360° | |
| Ось 5 | ±120° | |
| Ось 6 | ±360° | |
| Максимальная скорость | Ось 1 | 85°/с |
| Ось 2 | 70°/с | |
| Ось 3 | 82°/с | |
| Ось 4 | 114°/с | |
| Ось 5 | 75°/с | |
| Ось 6 | 164°/с | |
| Внешняя среда | Температура | 0~45° |
| Влажность | 20%~80% | |
| Вес, кг | 1120 | |
Представленные в обзоре промышленные шарнирно-сочленённые роботы изготавливаются в Китае. Это оборудование отвечает требованиям безопасности, отличается высокой надёжностью и не уступает по качеству аналогам из США, ЕС, Южной Кореи и Японии. Стоимость китайских роботов ниже, чем у конкурентов из перечисленных развитых стран. Этот фактор сокращает срок окупаемости оборудования, что играет немаловажную роль в бизнесе.
Заключение
Шарнирные роботы-манипуляторы – это ещё один пример постепенного внедрения автоматизации в производственные центры. Очевидно, что появление машин обеспечивает максимальную производительность и конкурентоспособность компании. Поэтому роботизированные руки очень интересуют руководителей промышленных предприятий во всём мире.
Оставьте свои данные и наши трудолюбивые менеджеры ответят на все ваши вопросы!